
Vision & Robotica voor het beladen van een mango-schilmachine
ZTI ontwikkelt en bouwt innovatieve machines voor groente- en fruitverwerking: fruit is kwetsbaar, daarom dient het met de uiterste zorg verwerkt te worden. ZTI maakt machines die zich in de markt onderscheiden door hun zorgvuldige behandeling van het fruit tijdens het schillen, ontpitten, snijden of onttrossen. Het fruit blijft daardoor van absolute topkwaliteit en het verhoogt de aantrekkelijkheid en houdbaarheid van het eindproduct. ZTI biedt daarnaast ook complete oplossingen voor de verwerking van diverse soorten groenten als sluitkool, spitskool en broccoli. Van transportband tot complete verwerkingslijn. ZTI denkt mee en levert de benodigde machines en bijbehorende aan- en afvoerlijnen op maat.
Project
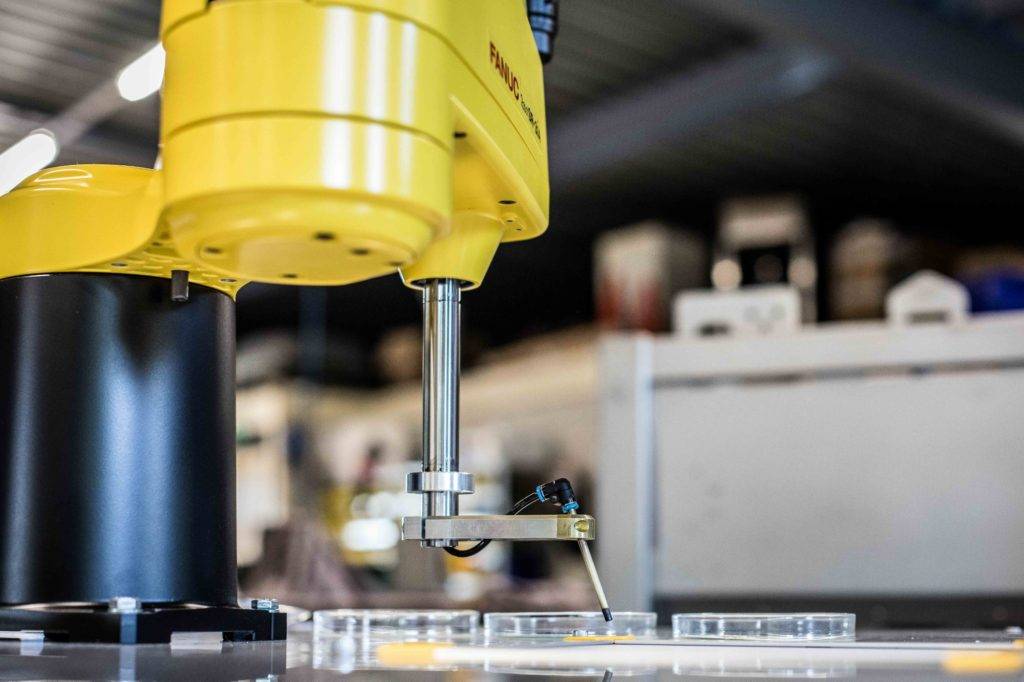
Automatisch beladen van een mango-schilmachine. Een generiek probleem in de categorie pick-en-place. De mango’s worden aangevoerd in kratten, maar er is geen sprake van bin-picking: eerst worden de mango’s verenkelt vanuit een waterbad met een opvoerband. Tot nu toe wordt de plaatsing in de schilmachine gedaan met menselijke arbeid. De korte cyclustijd (<3 seconden per mango) maakt het handmatig inzetten vooral een geestdodende taak. Tegelijkertijd is het inzetten niet triviaal: de vrucht heeft van binnen een platte pit die met de juiste oriëntatie geplaatst moet worden, anders gaat het mis bij het ontpitten.
Werkzaamheden lectoraat Robotica
Een Inholland WTB afstudeerder heeft onder begeleiding van het lectoraat het praktijkonderzoek voor ZTI uitgevoerd. Het inzet-probleem bleek lastiger dan gedacht. Zoals vaker omvat de door een menselijke operator uitgevoerde en ogenschijnlijk simpele pick- en place-taak meer dan de pure inzethandeling. Zoals verwacht, bleek het uiterst belangrijk om de vrucht met de pit in de juiste stand in de machine te plaatsen. Maar een mango is bijna perfect eivormig en daardoor is het lastig om te zien wat de juiste oriëntatie is. De meeste mensen zijn van nature goed in gezichtsherkenning en kunnen met deze zelfde vaardigheid ook heel goed kleine a-symmetriën in vruchten ontdekken.
Maar tijdens het onderzoek bleek dat diezelfde ongeschoolde operator en passant nog veel meer kwaliteitscontroles op de vrucht uitvoert, voordat deze in de schilmachine geplaatst wordt:
– Is de mango niet te groot? Anders loopt de messen van de schilmachine daarop vast
– Is de mango niet te klein? Dan wordt deze niet goed verwerkt.
– Is de mango niet te rijp? Op een te zachte mango happen de schilmessen te diep in het vruchtvlees en loopt de schilmachine vast
– Heeft de mango geen rare plekken of vlekken dan is de vrucht misschien rot
– Tenslotte: Hoe bepalen we op een robuuste manier de oriëntatie van de pit?
Resultaat
Het belangrijkste resultaat is een compleet concept-ontwerp voor een gerobotiseerde beladings-oplossing. Met aparte stations voor het controleren van afmetingen en rijpheid van de mango’s. De positie van de pit wordt bepaald met Röntgenstraling. Lessen geleerd: een simpel pick-en-place vraagstuk bestaat eigenlijk niet. Vraag tijdens de requirements-analyse fase goed door op alle verborgen kwaliteitscontroles die een ‘simpele’ operator impliciet of expliciet doet. Mensen ‘kijken’ ook met hun handen, voelen rijpheid en oriëntatie.